Degrees Of Freedom
This term describes, for any robot limb, joint or base, how many directions it can move in, and places at which it can move. It is commonly abbreviated as DOF.
The classic example is a robot arm. One which has a simple shoulder, and gripper could be said to have 2 DOF. Those being the movement of the shoulder, and the action of the gripper.
An arm which has a rotating base, a shoulder and elbow, and rotating wrist with a gripper could be said to have 5 DOF. It is common though to exclude the gripper itself when referring to an arms Degrees of Freedom.
6 DOF is considered the kind of freedom a humanoid arm has. There are 2 for the shoulder, horizontal and vertical motion, 1 for the elbow, and 3 for the wrist being rotation, h and v.
The following image shows a limb:
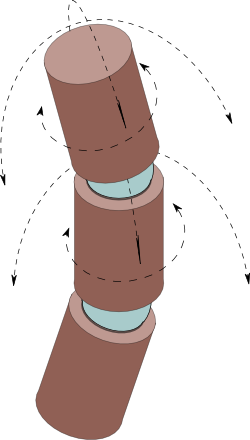
The pictured limb has 3 segments. Between the segments are ball joints, allowing rotation around the axis, and tilt in an X and Y axis. Each joint has 3 degrees of freedom, so the whole assembly here has 6 DOF.