The ASUS Eee PC is a small netbook laptop, which seemed about the right size to balance on a medium robot. The Aurorans, a London based gathering of robot builders, suggested that the participants start building a robot. I thought this was a great opportunity to try this out in practice.
I started the build having purchased a Devantech MD-01 drive system with the MD-25 controller, some wheels, brackets and large geared motors including encoders.
I then needed to find a chassis, and found some broken and scuffed plastic, on a hill while walking in the snow (yes there was light snow).
First I needed to measure it and cut it from the board.


I also needed to drill ports for motor cable bundles
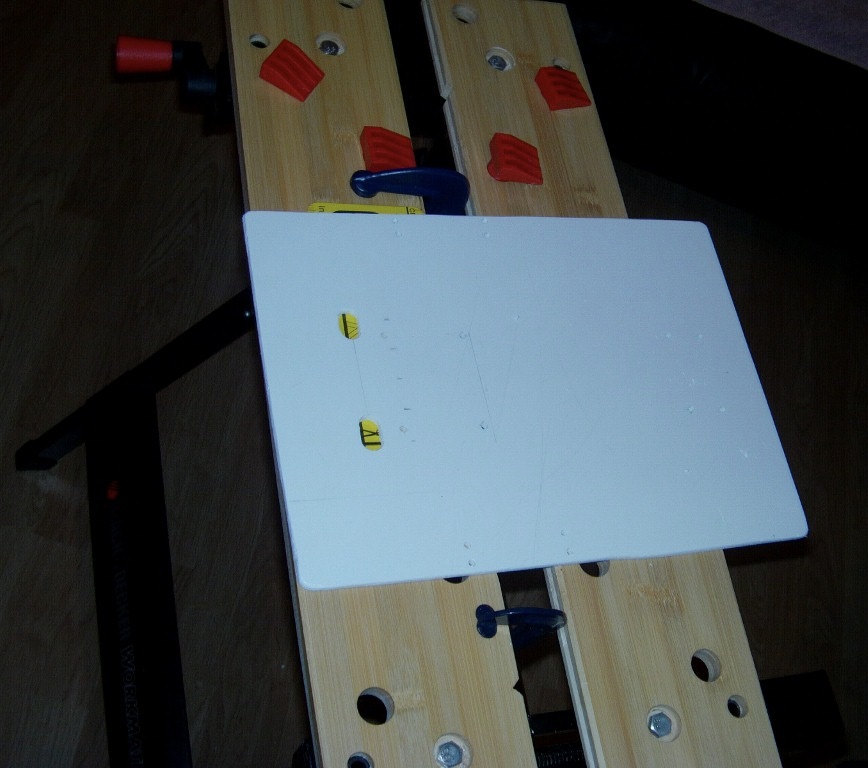
Then I started fitting parts to it. I started with a castor at the front of the robot. Note the motors are in their brackets ready to fit. The scuffs on the board are clear visible here too.

I then fit the motors - bolting them into the holes.
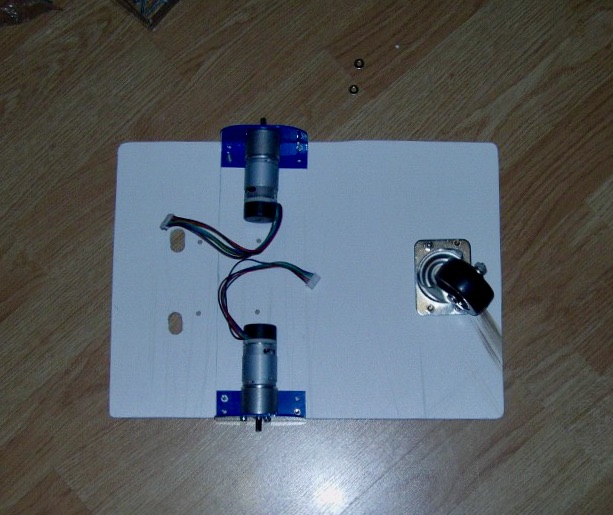
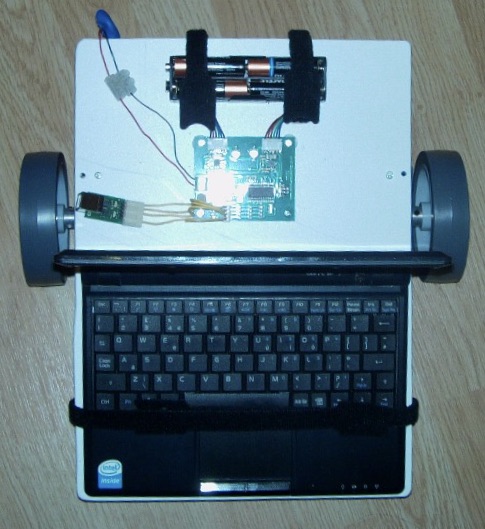
Flipping the robot over, I bolted on the MD-25 motor control board - this is quite handy, with an onboard microcontroller that performs encoder counting and speed control. There’s a battery snap and a USB to I2C board too.

At this point I bolt on the wheels. Also the wires from the motors have been brought through their ports and connected into the MD-25 controller.
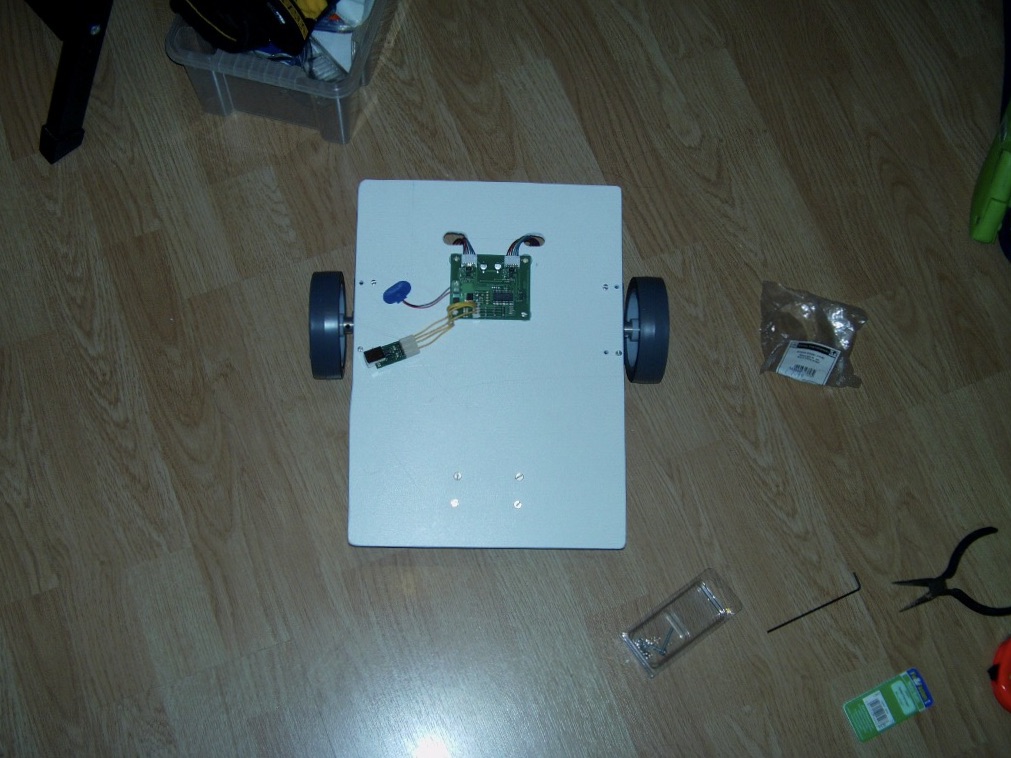
I used velcro to strap in 8xAA batteries, making further use of the motor cable ports. These are primarily intended as motor batteries.

Then I used further Velcro to strap in a EeePc that will serve as a controller for this robot:
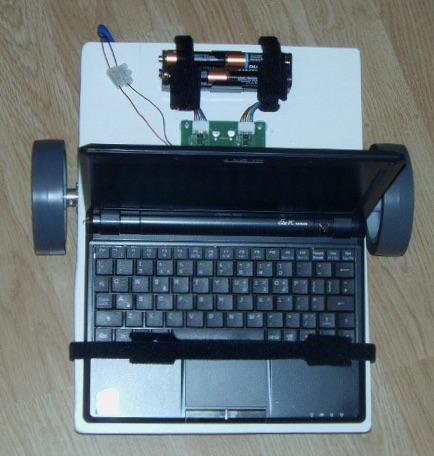
What remained was attaching the USB port and then programming to connect the two.