The last few days I’ve been trying to get my PS3 DualShock controller working with the Approx Eng Input library for python.
However, I was getting really weird results when doing early testing. The controller was giving off readings on the left stick, and nothing on the right stick.
Recap
However, I had the ear of approx_eng via social media. After I picked up the Raspberry Pi SD image he suggested, he gave lots of help - introducing me to the /dev/input filesystem enumeration for pads and sticks, and the evtest system.
I started digging (in yesterdays blog), and then reading lots of manual pages. The key moments were evtest.
First - I was able to see there were two event sources - 0 and 1. 0 was the motion sensors, and 1 was the controller itself.
I was then able to see that I had to debug the event devices. I set up some simple code based on the custom controller stuff in input: https://approxeng.github.io/approxeng.input/addingcontrollers.html.
from approxeng.input.selectbinder import bind_controller
from approxeng.input.dualshock3 import DualShock3
from approxeng.input.controllers import find_single_controller
# Locate a controller, instantiate it, and retrieve the InputDevice devices with which it's associated
# This will raise IOError if it can't find an appropriate controller
devices, controller, p = find_single_controller(controller_class = DualShock3)
import pdb
pdb.set_trace()Here I was able to inspect devices - and see that the system enumerated 2.
(Pdb) devices
[InputDevice('/dev/input/event1'), InputDevice('/dev/input/event0')]
(Pdb) controller
Sony DualShock3 (Playstation 3) controllerI was then setting the system up to remove one:
devices = [devices[0]]Doing this yesterday got me the info for the first stick. So after sleeping on it,
I decided this evtest would give me more info on the stick.
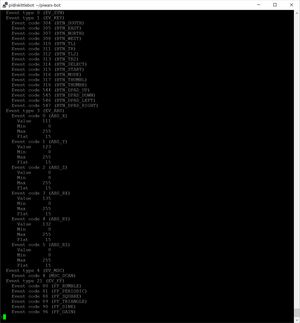
The output from evtest was quite instructive:
I was able to look up the code for the DualShock3 mappings in the input library and patch it: https://github.com/ApproxEng/approxeng.input/compare/master...dannystaple:patch-1
I then fix this into a new bit of code for driving a motor from the Y axis on each stick. This got me a robot driving around under stick control. It still stalls lots on carpet - but not on laminate flooring.
So what is next?
- Fitting camera
- Fitting distance sensors
- Getting my SkittleBot code adapted for both the driving style and new opencv.
- Making the distance sensor code.
- Tidying up - cables a mess - my plan is to use PC drive power adaptors.
- Making a cover - not sure how much time, but this is Helena’s most wanted task.