Taking apart the control box
Teardown
Last night I took apart the CNC machine controller box and took lots of photos.
In terms of basic parts there is a power/spindle board, the power and spindle switches, the spindle speed variable resistor, a big power transformer (10cm+ toroidal thing), and then the stepper controller board.
Looking at the power board
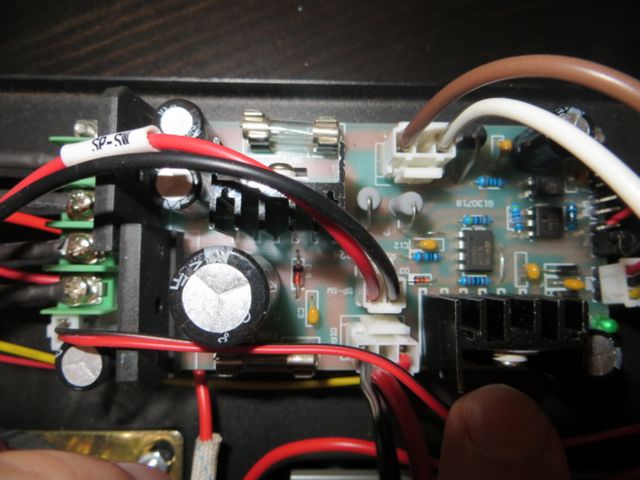
First here you see on the left the basic power input - with 2 fuses - not sure yet why. There is also a fuse at the inlet socket for the box, and a fuse in the plug. This power board appears to be pretty well protected.
There are two heatsink devices. One is a 12v regulator (7812) going to the stepper board, and the other a FET (an IRF740) controlling the spindle. The cable labelled SP-SW is the spindle switch.
There is a small cluster of DIP ICs on the board:
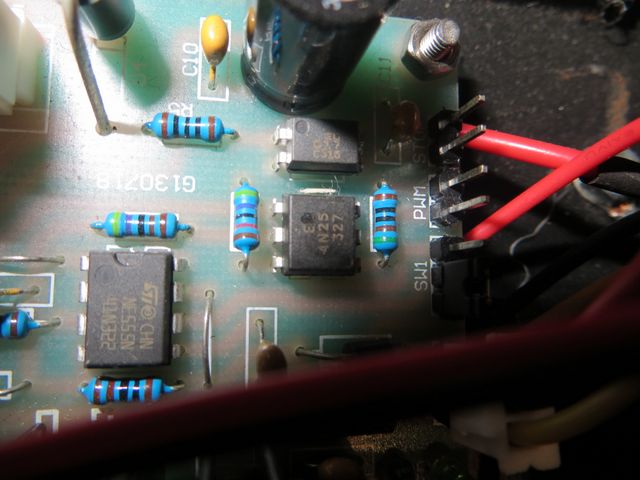
These include a 555 controlling PWM for the spindle, a 4n25 opto-coupler, and the c222, another kind of opto-coupler. These integrated circuits all seem to be related to enabling and controlling the spindle speed.
Next the stepper board
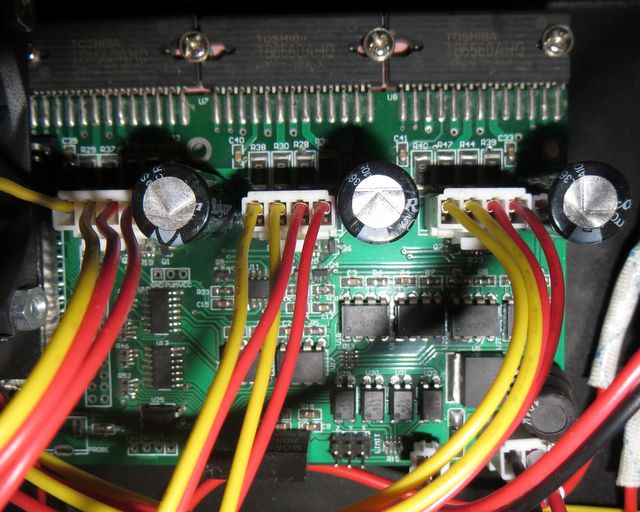
Immediately obvious in this image are the 3 stepper controllers, all using the Toshiba TB6560AHQ. This whole board is resting upon a big heatsink attached to these.
Close to the stepper controllers are big electrolytic caps, presumably to decouple motor noise from logic. There are also flyback diodes.
There are 2 Dc/Dc converters. Presumably one is for the logic components, and the other for the stepper power. The big MORNSUN B0505LS-1W is 5v, and the other converter is the 1501-50.
There are 6 blocks of the 6n137 opto-couplers. Perhaps this is 2 per stepper channel? Each opto-coupler is capable of 1 logic line. My guess is that they bring pulse and direction to the stepper controllers.
The opto-couplers look to be driven from some 74hc14d schmitt trigger buffers. The buffers bring the logic from the parallel port input to the Opto-couplers.
There are some small opto-couplers going in the other direction which are probably for limit switches and the emergency stop signals.
See the rest of the teardown shots