MaixSense A010 Day 2 - Sipeed Support
In yesterday’s Maixsense A010 post I had reached a block, and it hadn’t worked either standalone, or via the serial port.
I contacted Sipeed (the manufacturer) for help via twitter, and their Indigogo campaign. They responded within 24 hours, and suggested I try a USB power supply (no computer). I tried a simple 5v 2.4a USB power supply, and it worked - I got a display.
This led me to questioning the power supply from the port I was using on my Macbook. This was a Mokin dock, which must have not been supplying enough current for it to start up correctly.
I tried a different dock on the Macbook, which works! I was now able to see output on the sensors screen while connected to my laptop.

Comtool
Yesterday, I’d set up comtool. Today I tried again, the graph screen was still left from before. I connected to the second serial port from the device, set the header, unticked and reticked USB and I started getting data from the device:
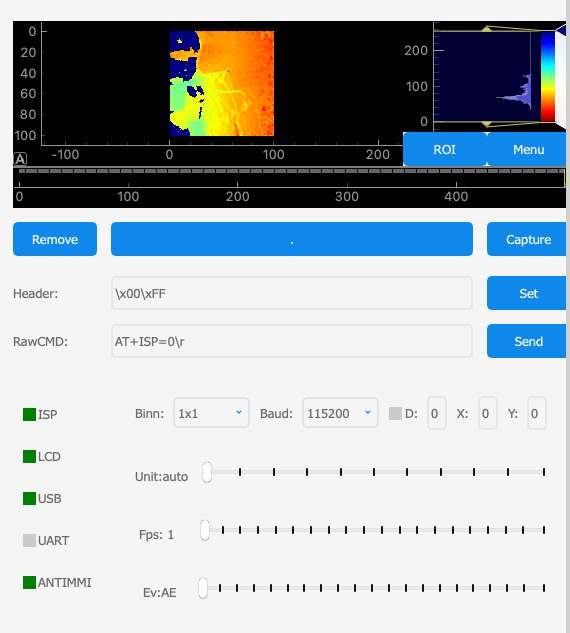
The screenshot shows Comtool with an image capture (continuous) from the sensor. There’s a robot with messy wiring in shot. The hue of the picture shows the depths.
Now I’ve seen it work, I can consider how to use this in robot code. My thinking is this might be in ROS on a Raspberry Pi 3 or 4.